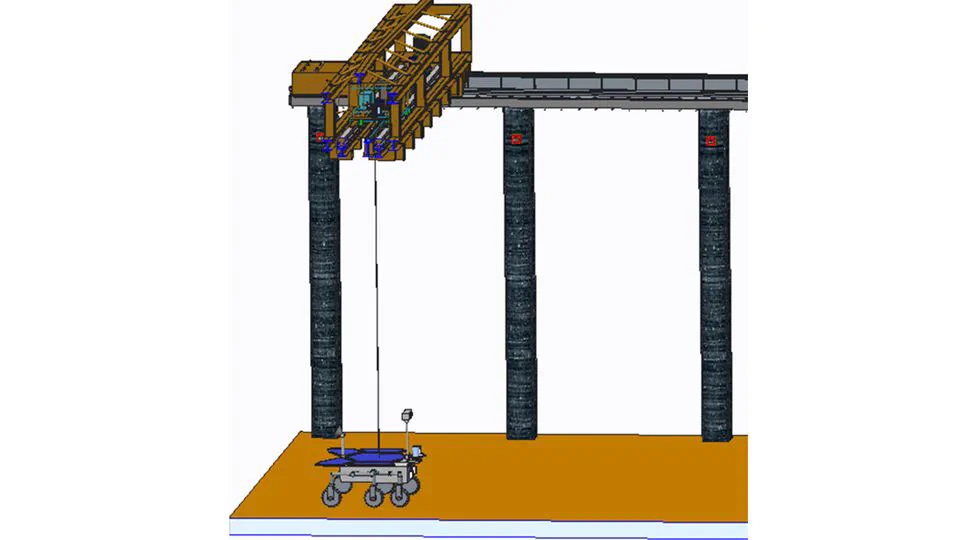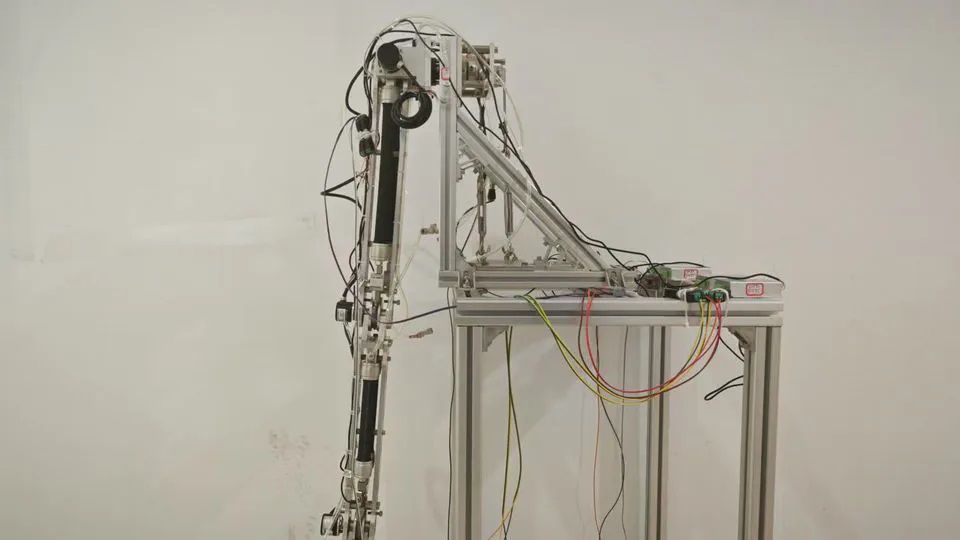
本实验室坚持理论方法研究与工程应用验证并重的发展思路,围绕以起重机为代表的欠驱动机器人、微低重力模拟系统、仿生机器人、变结构机器人等复杂机电系统的自动控制与智能决策问题,系统开展深入的研究工作,致力于提升装备的自动化、智能化与安全可靠运行水平。在工程实践与平台建设方面,实验室与企业联合研制了国内首台32吨智能工业吊车,并搭建了桥式、船用、塔式、桅杆式吊车等多种实验平台;同时,将所提方法应用于航天器微低重力模拟系统,为航空航天随动控制研究提供技术支撑。此外,实验室形成了以仿生软体机器人与气动肌肉机器人为代表的特色研究体系,覆盖软体建模、柔顺驱动、多自由度同步控制等关键问题。面向公共安全与极端环境应用,开展了消防机器人群体协同、路径规划与集群编队控制研究,并进一步拓展至跨域变结构机器人的多模态运动与切换控制。基于上述智能机器人平台,实验室提出并验证了一系列轨迹规划、非线性控制与协同决策方法,相关成果在工业生产、公共安全与复杂环境作业中展现出良好的应用效果与推广潜力。
孙宁教授,南开大学/南开深研院、博导、战略发展部副部长,深圳河套学院兼职教授,青年长江学者,宝钢优秀教师,天津市杰青,日本学术振兴会(JSPS)外籍特别研究员。从事机器人智能控制与应用方向的工作,主持国家自然科学基金重点项目、联合重点项目、面上项目(2项),国家重点研发计划课题(2项)等。出版专著3部,一作/通信发表IEEE Transactions及Automatica论文76篇,授权发明专利30余件。获IEEE TIE杰出论文奖、中国智能制造十大科技进展、国家教学成果二等奖、天津市自然科学二等奖(排名1)、天津市科技进步二等奖(排名1)、天津市自然科学一等奖(排名2)、吴文俊人工智能自然科学一等奖(排名2)、天津市专利奖2项(排名1、2)、IEEE TSMC: SYSTEMS优秀编委奖等。担任IEEE TIE、IEEE TSMC: SYSTEMS、IEEE TITS、IEEE/ASME TMECH、IEEE TASE等期刊编委。