首页
学术成果
论文
专著
专利
科研奖励
科研项目
研究方向
欠驱动系统
微低重力模拟系统
变结构机器人
仿生机器人
应用推广
团队成员
师资力量
学生团队
毕业校友
联系我们
首页
学术成果
论文
专著
专利
科研奖励
科研项目
研究方向
欠驱动系统
微低重力模拟系统
变结构机器人
仿生机器人
应用推广
团队成员
师资力量
学生团队
毕业校友
联系我们
变结构机器人
陆空两栖机器人 陆空两栖机器人,一种融合了地面无人车辆与空中四旋翼飞行器的新型变结构机器人,与传统的无人车和无人机相比,具有较强的适应性和高灵活性。它不仅拥有更广泛的应用前景,还具备更深入的研究意义,因此逐渐成为国内外的研究热点。1.1 研究挑战欠驱动特性:无论是在地面运动模态还是空中飞行模态下,陆空两栖机器人都面临着“以少控多”的挑战,这对控制方法的设计提出了更高的要求非线性、强耦合性:陆空两...
陆空两栖机器人
Jan 05,2026
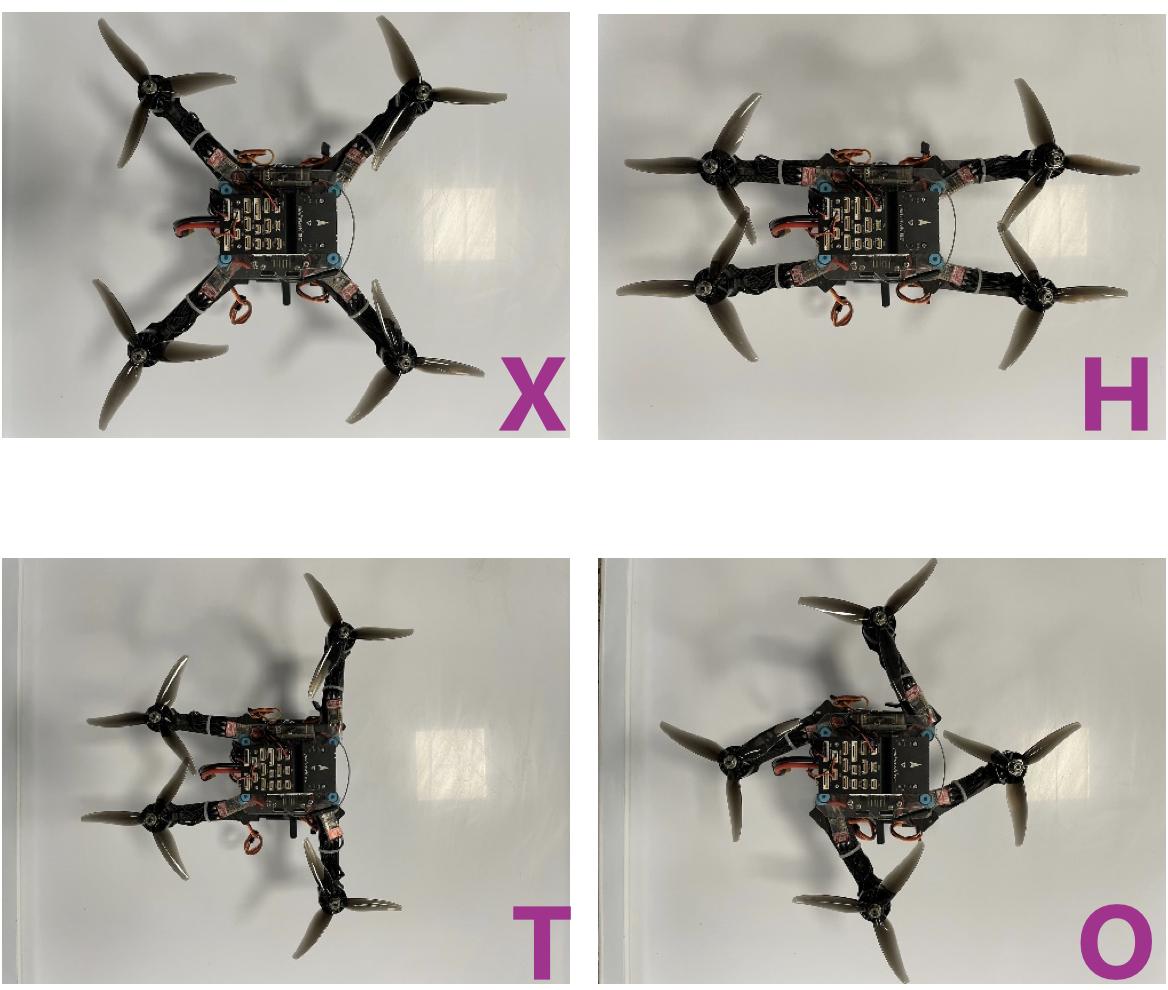
变结构无人机 无人机由于其操作简单,机动性强,成本低,稳定性高等优势,广泛应用于军事领域和民用领域,如侦察、打击、运输、资源勘探、搜索救援、工程巡检等场景。然而现有的传统固定结构无人机在面向复杂的作业环境时作业模态单一,环境适应性弱。因此,我们根据自然界中的鸟类飞行时可通过折叠翅膀的仿生学原理,研制了一种可变结构的无人机,从而提高无人机的环境适应性。2.1 研究挑战机架刚度降低,稳定性降低:由于...
变结构无人机
Jan 05,2026
自主与集群智能消防机器人研究挑战火场环境下的机器人状态重构需处理大量状态数据,确保机器人运动路径的实时动态重构。 智能指挥调度需考虑火场信息感知受限、通信中断等问题,对调度策略进行优化。 集群编组与自主任务分配需考虑能源、负载、救援任务高优先级等因素,实现多机器人任务的最优分配。 自主智能协同作业技术需解决机器人在复杂火场环境中的协同作业问题,包括联合破拆、清障与...
自主与集群智能消防机器人
Jan 05,2026
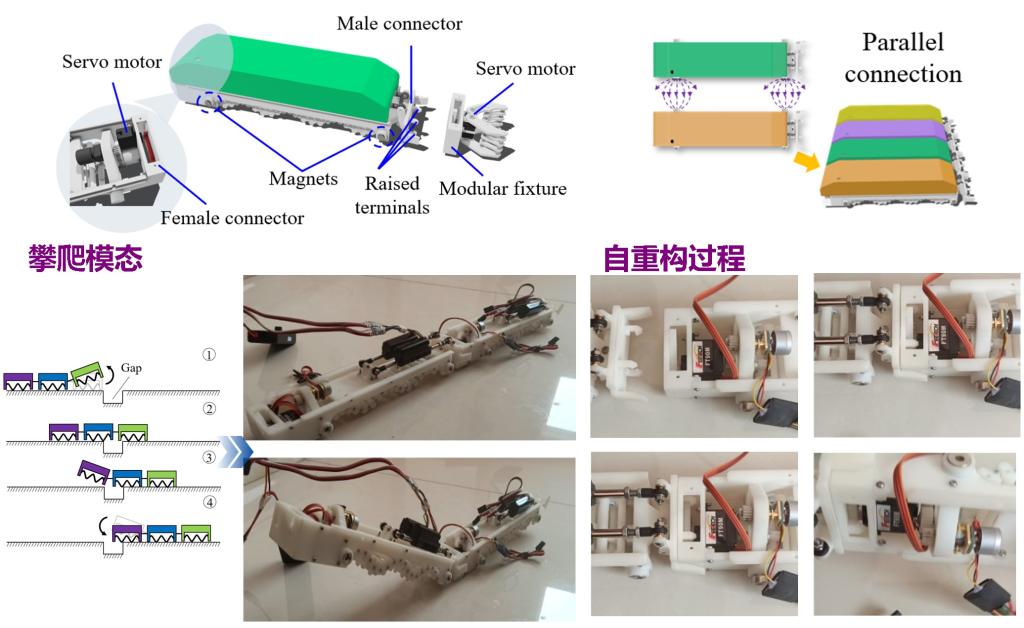
行波驱动自重构机器人 传统的移动机器人结构固定,难以适应时变的环境。自重构模块化移动机器人是指由一系列移动机器人模块组装而成、能够根据所处环境或任务的变化依靠模块间的相互通信和自主移动重组为另一种适应新环境、新任务构型的机器人,具有多功能性、鲁棒性和重用性等诸多优点。此外,波状爬行机构受到微生物通过鞭毛游动的启发,其能够在不同的表面移动,并采用单个驱动器驱动整个机构爬行,具备高集成度的特点。...
行波驱动自重构机器人
Jan 01,2026