首页
学术成果
论文
专著
专利
科研奖励
科研项目
研究方向
欠驱动系统
微低重力模拟系统
变结构机器人
仿生机器人
应用推广
团队成员
师资力量
学生团队
毕业校友
联系我们
首页
学术成果
论文
专著
专利
科研奖励
科研项目
研究方向
欠驱动系统
微低重力模拟系统
变结构机器人
仿生机器人
应用推广
团队成员
师资力量
学生团队
毕业校友
联系我们
仿生机器人
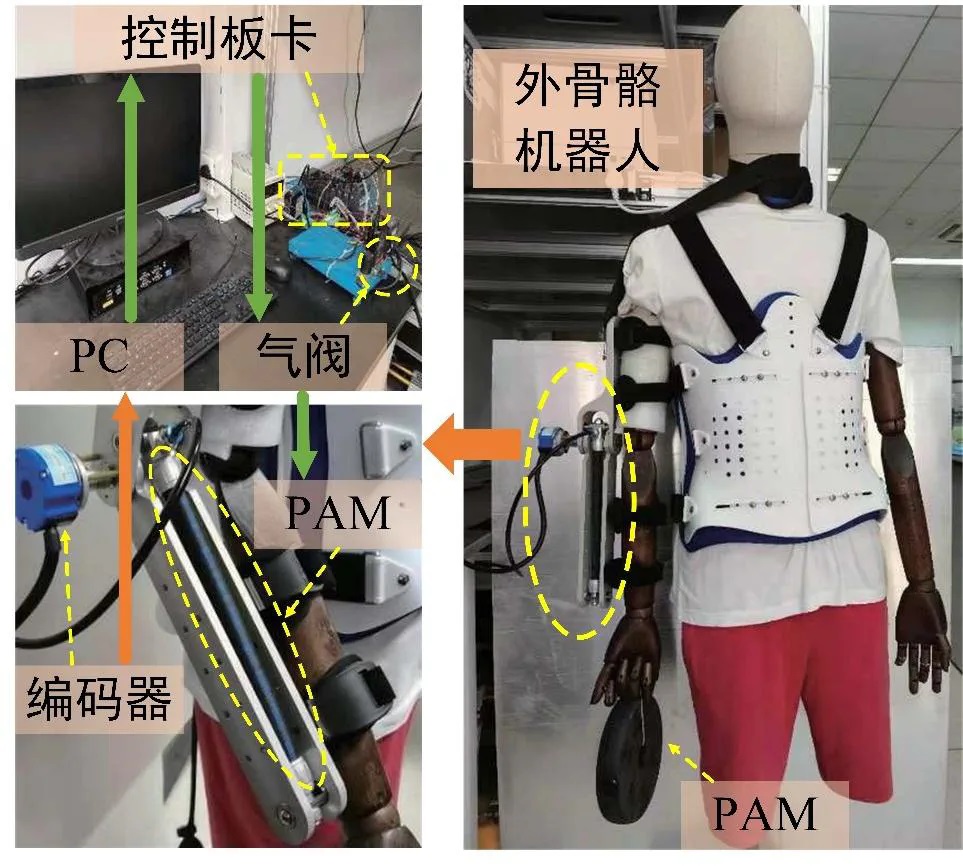
第四次智能浪潮的脚步接踵而至,工业制造、医疗康复、抢险救灾等领域智能化、自主化需求日益迫切,仅使用传统刚性驱动方式(如电机、液压等)去协助人类完成简单重复的机械任务,很难进一步推动新一轮科技革命和产业变革。与生物肌肉具有基本相似形态结构、如出一辙运动机理的柔性元件——气动人工肌肉(pneumatic artificial muscle,简称PAM),逐渐成为了机器人驱动、建模、控制领域的重点关注对象。PAM结构简单、材料轻便,...
气动人工肌肉
Apr 10,2026
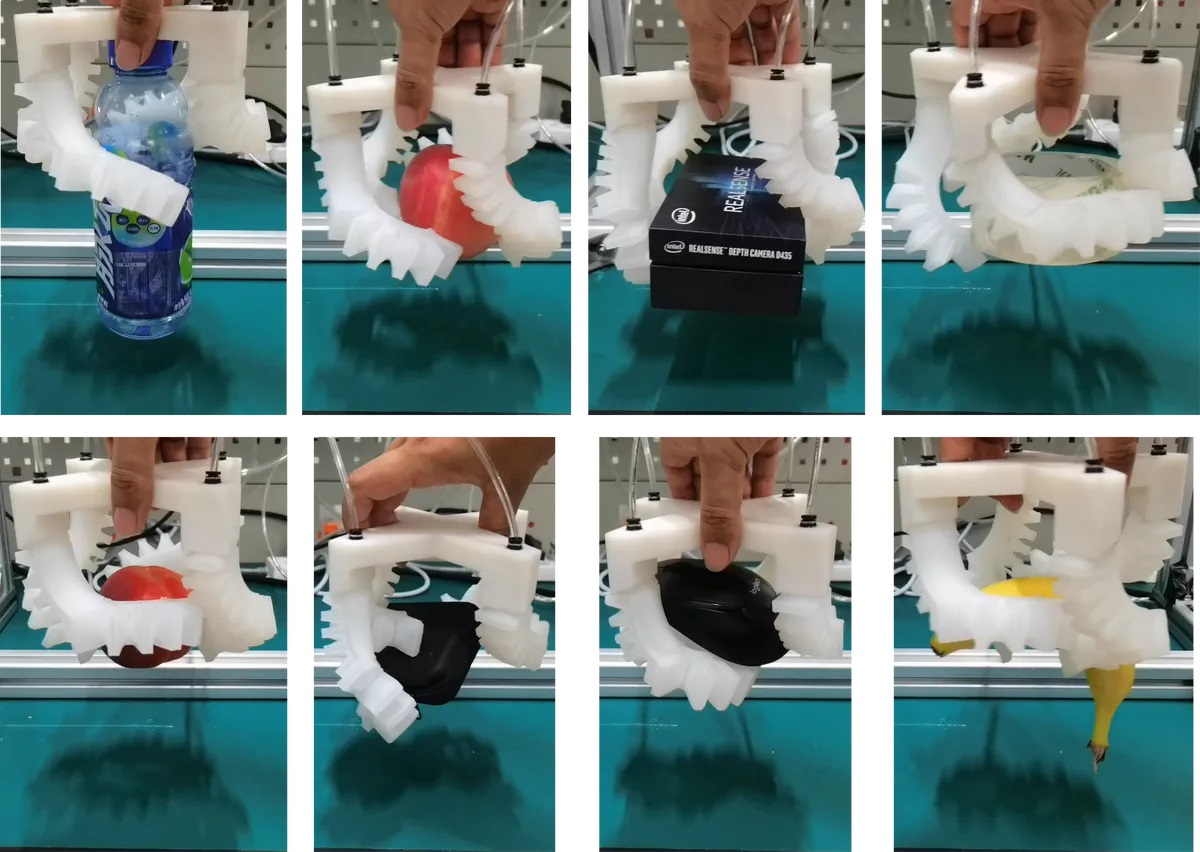
仿生气动软体机器人研究挑战复杂的结构设计与制作:为充分模仿生物特性,提升负载能力与运动速度,软体机器人及其驱动器的结构设计较为困难,不仅需要考虑运动功能的实现,还要尽可能减少气路消耗、避免复杂结构以及还原生物运动模态。此外,弹性较好的柔性材料往往需要通过人工进行浇铸制作,导致模具与制作流程的设计难点以及大量的稳定性测试。模型难以描述:由于自身的柔性材料和复杂结构,软体机器人及其驱动器往往伴随着...
仿生气动软体机器人
Apr 09,2026
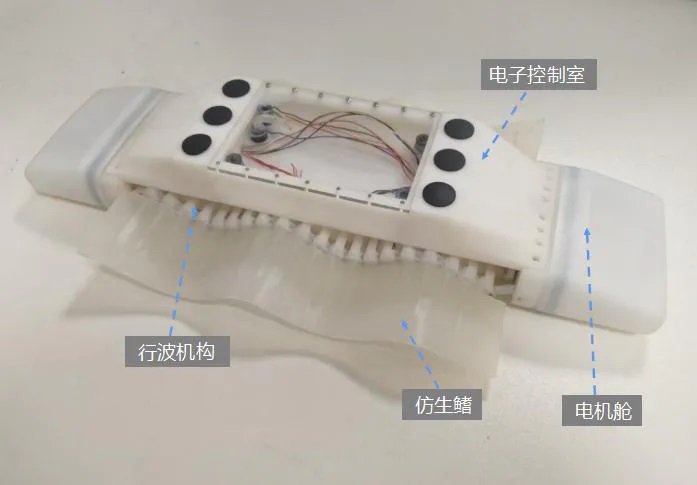
仿鳐鱼水陆两栖机器人 自主移动机器人是可以在特定环境下进行坐标移动的机器人,其具有感知、交互、定位、运动规划、导航、决策等功能,可以执行特定任务,实现预期目标。 根据陆地、空中、水域等应用领域划分,主要包括单栖移动机器人和多栖移动机器人。就执行机构而言,陆地移动机器人的移动方式主要有足式、轮式、履带等,空中移动机器人的移动方式主要有螺旋桨,水域移动机器人的移动方式主要有喷水推进器、螺旋桨等...
仿鳐鱼水陆两栖机器人
Apr 08,2026
仿腕关节机器人 受人类手臂启发的机械手在制造业、物流和仓储、农业等领域发挥着关键作用,将工人从简单重复的任务中解放出来。同时,作为机械手的重要组成部分,关节直接决定了机械手的灵活性、机动性和刚度。然而,刚性连杆方式机械手只能通过离散关节实现弯曲运动,这严重限制了其在受限操作空间内的灵活性和机动性。飞机舱内装配、核电设备维护和太空舱外作业等领域对机械臂的灵活性提出了更高的要求。研究挑战绳驱动刚...
仿腕关节机器人
Apr 07,2026