首页
学术成果
论文
专著
专利
科研奖励
科研项目
研究方向
欠驱动系统
微低重力模拟系统
变结构机器人
仿生机器人
应用推广
团队成员
师资力量
学生团队
毕业校友
联系我们
首页
学术成果
论文
专著
专利
科研奖励
科研项目
研究方向
欠驱动系统
微低重力模拟系统
变结构机器人
仿生机器人
应用推广
团队成员
师资力量
学生团队
毕业校友
联系我们
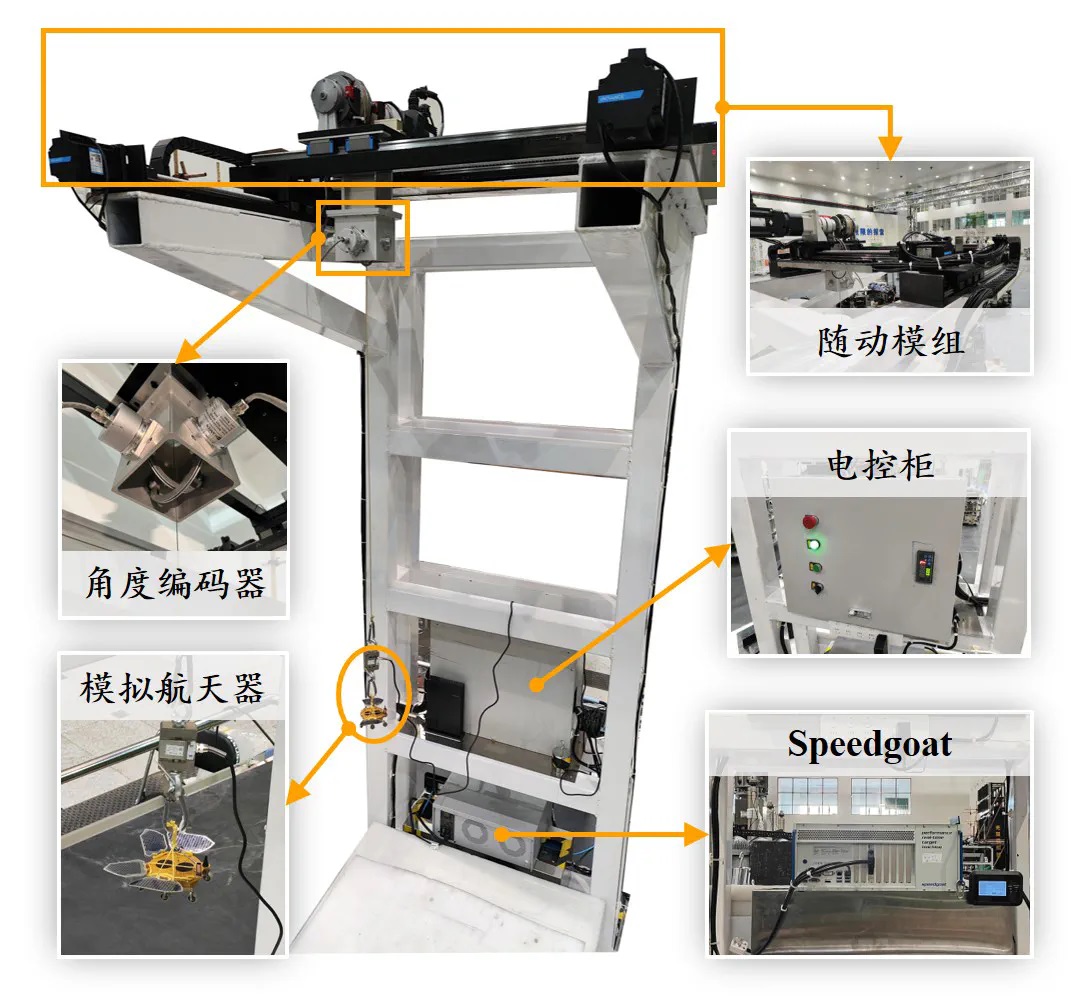
微低重力模拟系统
航天器悬吊式微低重力模拟系统 航天器需在微低重力环境下运行,但其制造与测试必须在地球重力条件下进行。不同重力环境对航天器的动力学特性影响显著,因此,微低重力模拟系统对于验证航天器性能、确保任务执行至关重要。悬吊法是一种常用模拟技术,通过吊装装置悬挂航天器,并控制吊绳张力等于其重力,以模拟微重力环境,广泛应用于运动控制测试。研究挑战高安全性的随动跟踪控制:二维平动机构需精准跟踪未知运动轨迹的卸...
航天器悬吊式微低重力模拟系统
Jan 05,2026