首页
学术成果
论文
专著
专利
科研奖励
科研项目
研究方向
欠驱动系统
微低重力模拟系统
变结构机器人
仿生机器人
应用推广
团队成员
师资力量
学生团队
毕业校友
联系我们
首页
学术成果
论文
专著
专利
科研奖励
科研项目
研究方向
欠驱动系统
微低重力模拟系统
变结构机器人
仿生机器人
应用推广
团队成员
师资力量
学生团队
毕业校友
联系我们
欠驱动系统
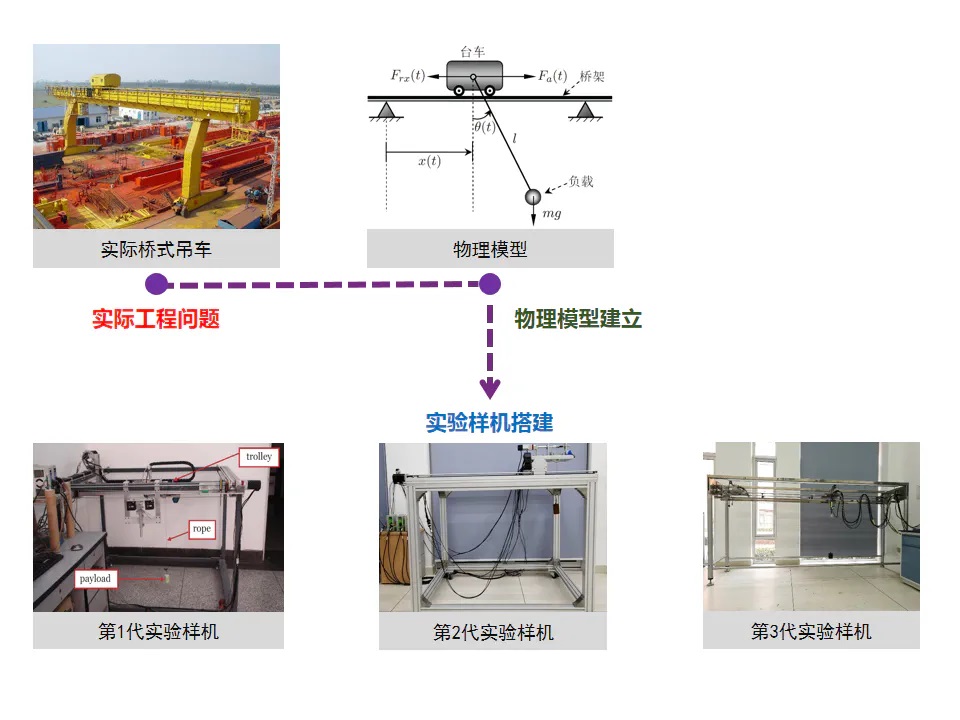
桥式吊车 在各类吊车中,桥式吊车最具代表性,应用也最为广泛。对于吊车系统而言,其所面临的最大问题在于台车运动及外界干扰(如风力等)引发的负载摆动,这不仅会降低整体的效率,影响负载在落吊过程中的精确放置操作,还可能引发碰撞而造成安全事故。在一些特殊的场合,如钢水包搬运,甚至期望能实现“无摆”运送,以防止高温钢水溢溅。1.1 研究挑战欠驱动特性,即控制输入个数少于系统自由度个数。仅能操纵台车的水平运动...
桥式起重机
Jan 05,2026
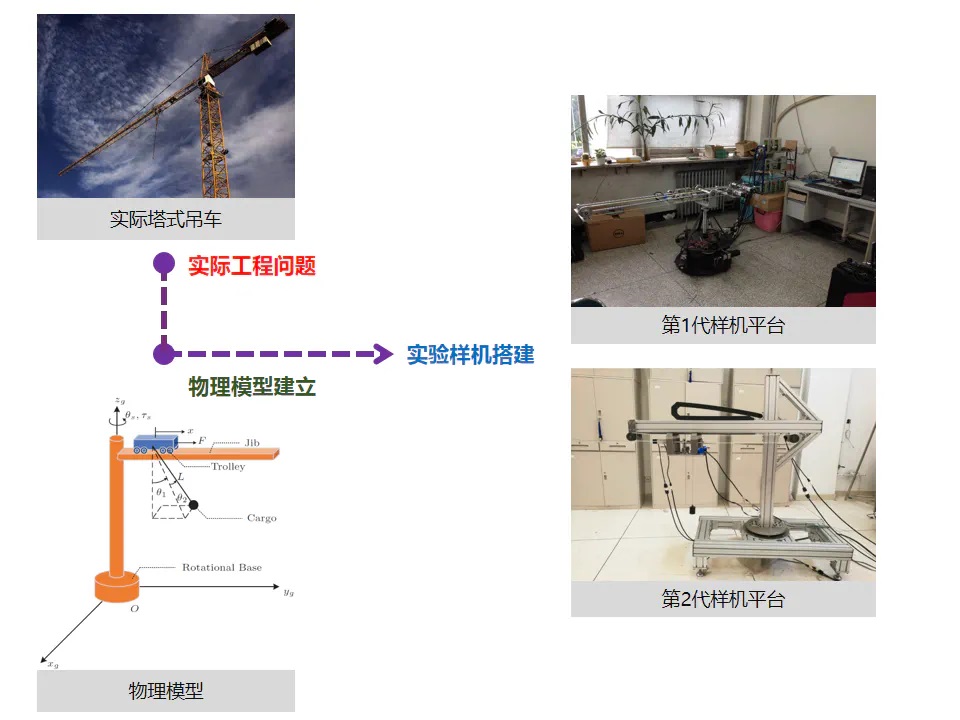
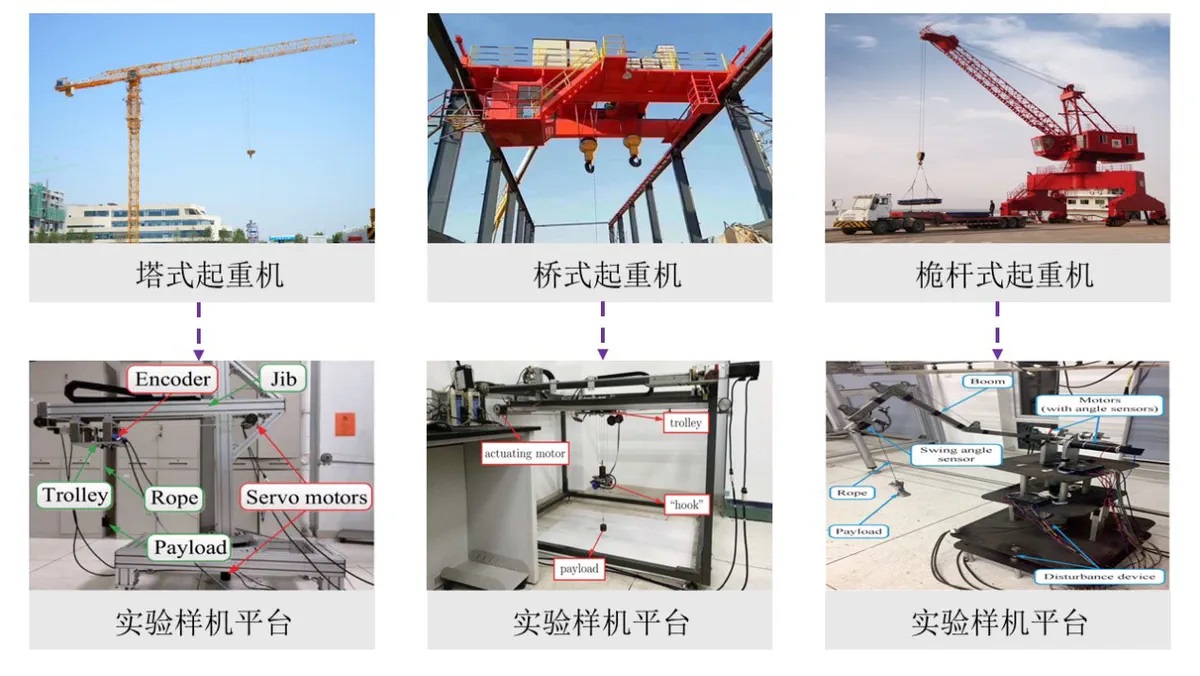
塔式起重机 相比于桥式吊车,塔式吊车包含旋臂的旋转运动,且其工作环境更为恶劣(高空、强干扰等)。旋转运动更容易激发负载在空间内的摆动,因此塔吊具有更加复杂的欠驱动特性、更强的非线性,且系统状态之间具有更强的耦合性。在这种情况下,非常难以实现负载的快速精准定位与消摆。然而,塔身高、回转半径大等特点,又使得塔式吊车的工作空间广、垂直作业效率高,更加适用于高层建筑的建设与修缮,这使其成为建筑业不可或...
塔式起重机
Jan 05,2026
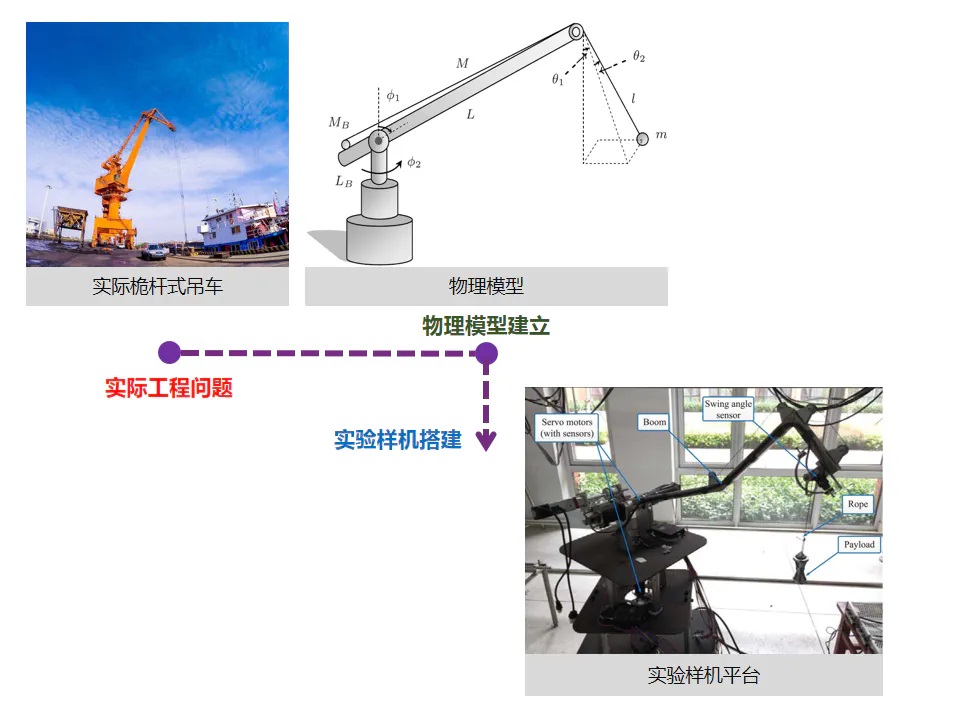
桅杆式起重机 相比桥式吊车,桅杆式吊车体积相对较小,既可以加载于车辆上,又可以固定于地面,具有较强的灵活性和更少的能耗,应用场景更加广泛。吊杆可以完成俯仰及旋转两个方向上的转动,在保证有限占地面积的同时极大地扩展了作业空间,提高了工作效率。 然而,桅杆式吊车状态量之间存在着非常强的耦合特性,同时涉及俯仰和旋转运动,会产生复杂的离心力,导致其动力学方程十分复杂,呈现出高度的非线性和耦合性,进...
桅杆式起重机
Jan 05,2026
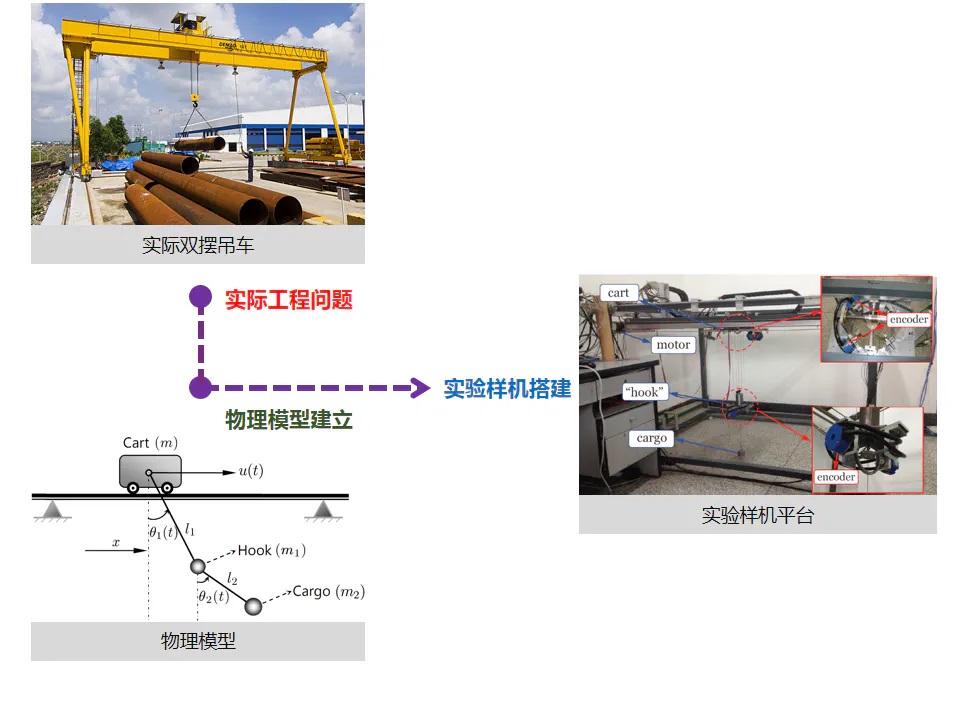
双级摆起重机 就目前而言,几乎所有研究人员在分析桥式吊车系统时,都忽略吊钩的质量,或把吊钩与负载视为同一质点,即将系统的动力学简化为单级摆动吊车。而事实上,在很多情况下,当台车运行时,吊钩会绕台车产生第一级摆动,货物则将相对于吊钩产生第二级摆动,即整个吊车系统会呈现出显著的两级摆动。 两级摆动特性的出现导致整个系统的自由度个数增加,在控制量维数不变的情况下,增加了吊车系统的欠驱动程度,增强...
双级摆起重机
Jan 05,2026
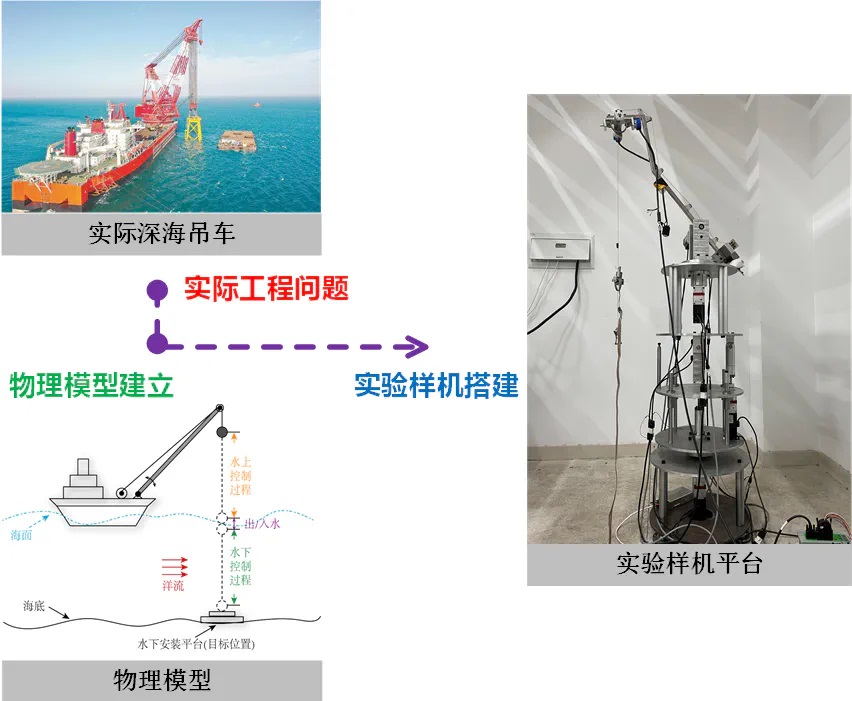
海洋起重机 近年来,在我国“海洋强国”战略、“陆海统筹”规划等指引下,深海资源的开采与利用备受瞩目,而深海吊车是作业过程中不可或缺的吊运设备。与海上吊车类似,深海吊车也安装于受海浪、洋流等影响的船体上,但其吊运负载一般位于海面以下、具体深度不等。这样一来,负载振动不仅受船体运动的影响,还因处于水中而使振动幅度被放大、更为敏感,同时也增加了负载的柔性特性。因此,深海吊车的动力学模型更为复杂,负...
海洋起重机
Jan 05,2026
一类欠驱动机电系统 欠驱动系统是指系统的独立控制输入数量少于系统自由度的一类动力学系统。这类系统无法通过直接控制每个自由度来实现完全操控,需依赖动力学耦合或环境交互实现目标运动。欠驱动系统由于执行器数量较少,在能耗和硬件成本方面具有显著优势,同时兼具灵活性和经济性特征,使其特别适用于轻量化设计或资源受限的应用场景。因此,如何在核心特征“驱动不足”的情况下,提高欠驱动系统的稳态与瞬态性能具有重...
一类欠驱动机电系统
Jan 05,2026
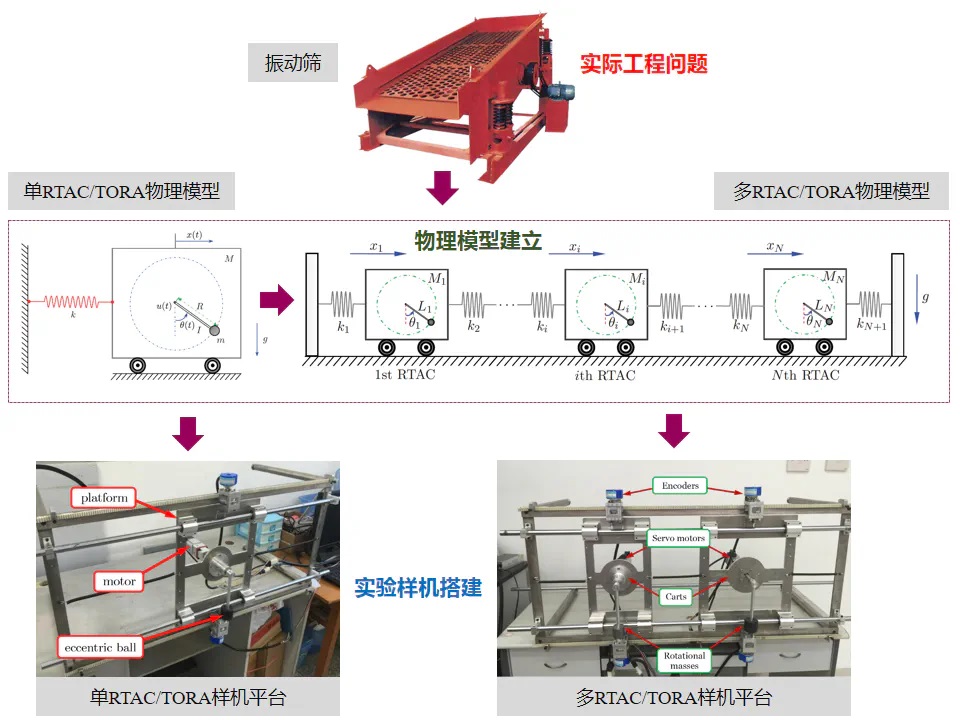
其它欠驱动系统-欠驱动RTAC/TORA系统 欠驱动RTAC/TORA系统是一种典型的欠驱动系统,由可驱动的旋转转子与不可驱动的、做平移运动的定位平台组成,可用于研究振动筛等大型机械设备的工作原理,同时也可用于分析振动系统自同步现象。该系统的各状态相互耦合,表现出很强的非线性特性,给其控制方法设计与稳定性分析带来了很大的挑战。8.1 研究成果搭建了2套实验样机平台,提出了多种行之有效的非线性控制方法在IEEE Transactio...
其它欠驱动系统
Jan 05,2026