陆空两栖机器人
陆空两栖机器人,一种融合了地面无人车辆与空中四旋翼飞行器的新型变结构机器人,与传统的无人车和无人机相比,具有较强的适应性和高灵活性。它不仅拥有更广泛的应用前景,还具备更深入的研究意义,因此逐渐成为国内外的研究热点。
1.1 研究挑战
欠驱动特性:无论是在地面运动模态还是空中飞行模态下,陆空两栖机器人都面临着“以少控多”的挑战,这对控制方法的设计提出了更高的要求
非线性、强耦合性:陆空两栖机器人的各个状态相互耦合且具有较强的非线性特征,引入折叠角后,系统的非线性和耦合性进一步增强
模态切换特性:陆空两栖机器人在执行陆地/空中模态切换和空中展平/折叠模态切换任务时,往往会导致其动态系统发生变化,从而可能引发系统失衡,甚至失控
跨域运动特性:陆空两栖机器人陆地/空中运动模式差异较大,然而同一任务往往要求机器人进行连续的跨域作业,这为其运动规划和控制方法带来了更大的挑战
1.2 研究成果
搭建了陆空两栖机器人原型样机;
搭建了基于动捕平台的实验环境;
设计了变结构机器人统一系统框架;
提出了陆空两栖机器人陆空跨域路径规划方法;
提出了陆空两栖机器人变模态平滑切换方法;
提出了陆空两栖机器人路径跟踪方法;
17th ICIRA Best Paper Finalist Award
第一届全国建筑机器人技能大赛-创意竞赛金牌
第2届中国自动化学会博士学术交流会最佳海报奖
中国国际大学生创新大赛(2024)天津赛区高教主赛道铜奖
第二十六届中国国际高新技术成果交易会优秀科研成果创新奖
2024年天津机器人科技创新奖-技术突破奖
图1 陆空两栖机器人原型样机

图2 基于动捕平台的实验环境
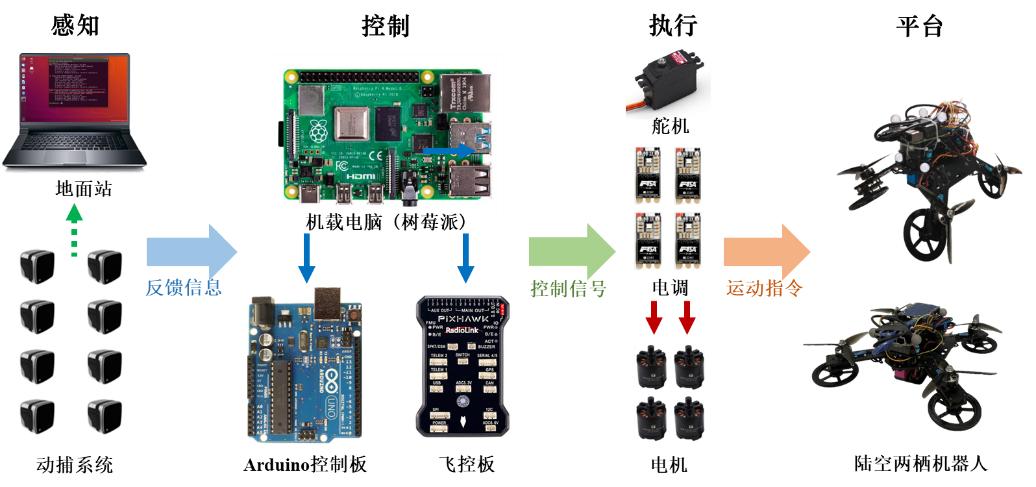
图3 变结构机器人统一系统框架
1.3 实验视频