变结构无人机
无人机由于其操作简单,机动性强,成本低,稳定性高等优势,广泛应用于军事领域和民用领域,如侦察、打击、运输、资源勘探、搜索救援、工程巡检等场景。然而现有的传统固定结构无人机在面向复杂的作业环境时作业模态单一,环境适应性弱。因此,我们根据自然界中的鸟类飞行时可通过折叠翅膀的仿生学原理,研制了一种可变结构的无人机,从而提高无人机的环境适应性。
2.1 研究挑战
机架刚度降低,稳定性降低:由于可变结构的设计,使得机身和机臂的连接处为可转动的关节,使得无人机整体刚性降低,稳定性降低;
变模态切换困难:模态切换时保持无人机的飞行稳定性控制困难;
建模困难:在建模时需要考虑无人机结构变化引起的重心和转动惯量变化。
2.2 研究成果
 图1 变结构无人机平台
图1 变结构无人机平台
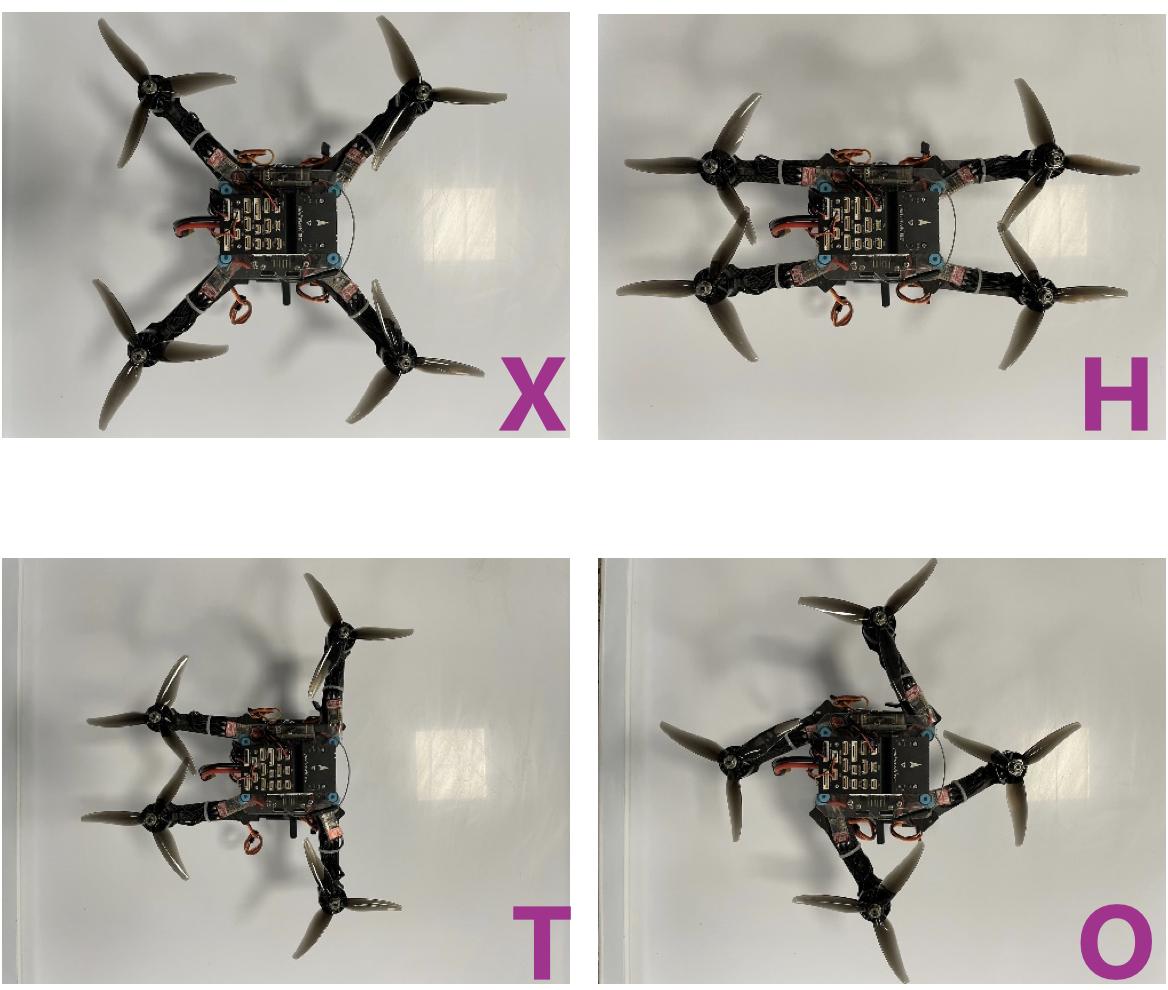 图2 四种常用模态
图2 四种常用模态
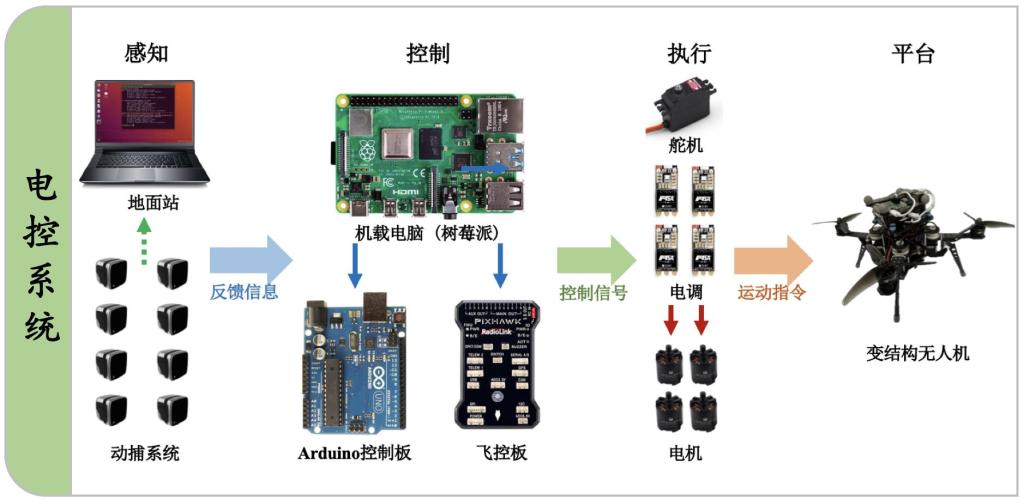 图3 电控系统图
图3 电控系统图
 图4 软件架构图
图4 软件架构图
2.3 实验视频
聚焦于室内复杂受限空间内多机器人协同作业任务,旨在提升灭火、救援机器人的协同作业效能。研究内容涵盖火场态势感知与预测、机器人状态重构、智能指挥调度、集群编组与自主任务分配,以及自主智能协同作业技术。项目致力于实现机器人在火场中的高效协同,包括快速定位、精准灭火与救援等任务,以提高整体救援效率与安全性。